Driver Node publish topics at different Interval #100
Comments
|
That's a new issue for me. |
|
I experienced this issue on a similar configuration and in our case, it was caused by the latency settings of the Ubuntu driver for FTDI. The solution was to set the low_latency mode of the driver and thus prevent it from accumulating multiple measurements. The command to execute after the device was plugged in: The setting resets once the device is disconnected but udev rules can be used to make it permanent. |
|
@MichalNowicki Thank you very much. I will try your solution quickly. |
|
Hi, I am having the same issue of publisjing with different interval partially: While trying to |
|
@zhouzhiqian was it a solution for you? |
|
Apparently, rosbag_validate displays the same ERROR: |
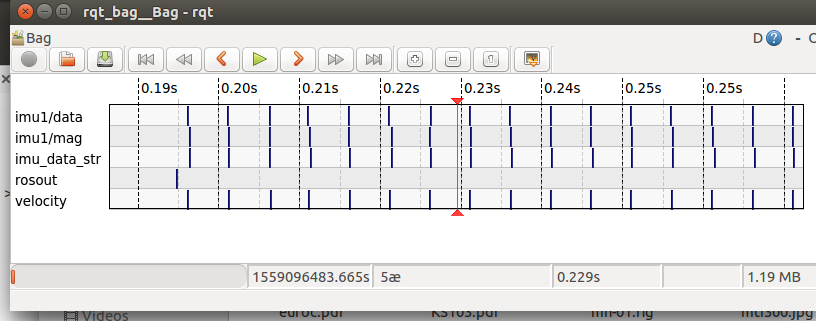
When I use MTI300 on Ubunty 16.04 + ROS kinetic, the intervals between every two topics don't keep 5ms (its frequency is 200 Hz).

Just like this figure:
But when I use it on Ubunty 14.04 + ROS indigo, it shows a totally different result.
)
The text was updated successfully, but these errors were encountered: