{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Check out for cool projects about drones and AI
The core technology behind Self Driving Cars today. Given the image of a road at a time frame, it can decide where to turn the steering and how much. I am working continuously to generalize it to as many different terrains as possible.
It uses a Convolutional Neural Network to predict the motion of the steering given the image of a road at a time.
Requirements: Python 3.5 ,Keras 2.0.2 , Tensorflow 1.2.1 , OpenCV 3.2, numpy 1.11.0
This approach uses Regression for predicting the angle of steering, and is clearly more successful and accurate than the classification approach which I used before. Regression provides flexibility to the results.
$ python drive.py
You can use it either on a live video feed from the webcam, or a pre saved video on disk for the demo.
Use the script cnn_train.py or train_cnn2.py(branch 2 named Regression-Approach). Make sure the datset is ready.
Use the script generate_data.py to generate the dataset.
It requires the path of a video on disk from which training samples will be generated along with the action taken by the user.
It automatically puts a frame in the right folder(class) according to actions taken by user while generating data.
To train the model.
This file is in branch named "Regression-Approach". This is to train the regressive model.
To generate the dataset from random videos.
The class that provides the GUI for simulator.
The main script that starts the simulator.
The pre trained models on 4 differnt terrains. Note that the model2.json is different in both the branches.
Weights of the corresponding models.
The classification based model:
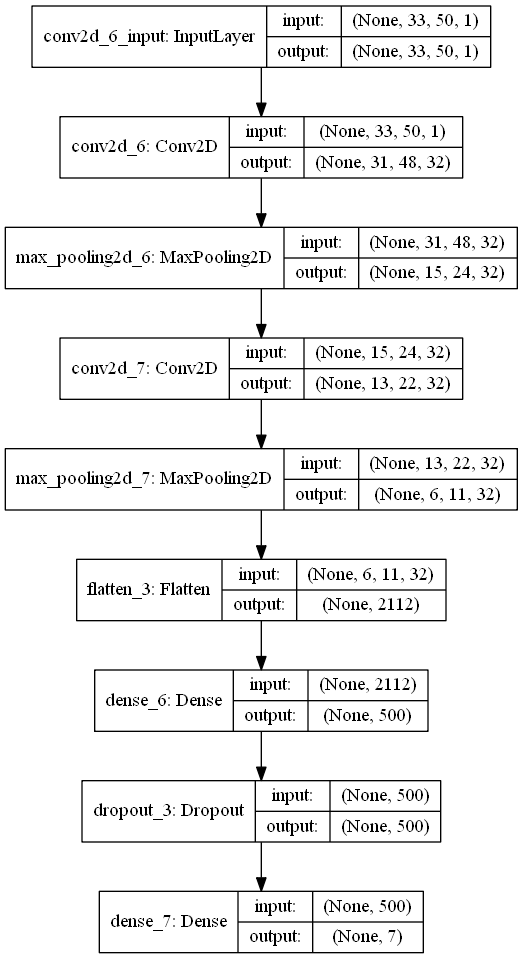
The regression based model:
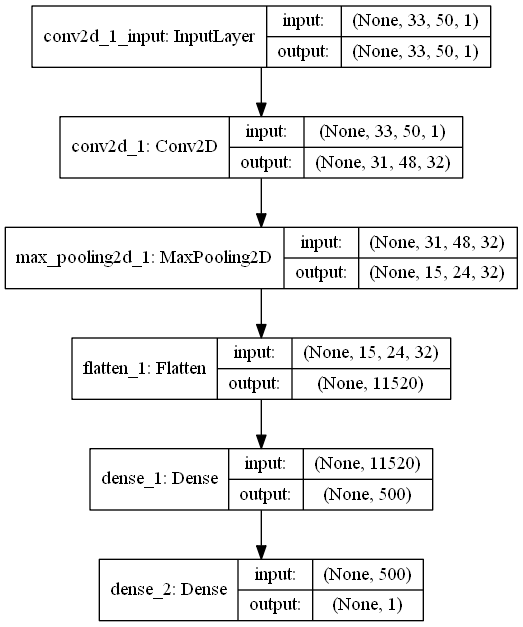
Trained using Backpropogation algorithm with stochastic gradint descent.
-Train acc: 96.4665%
-Test acc : 88.5039%
It may seem like it has been overfit. But no. It was the test set, which contained some wrong examples.
-Train error: 2.0311 (Mean absolute error)
-Test error: 2.4532