The USB Knob is a versatile device that combines the functionality of a rotary encoder with the convenience of a USB interface. It is based on the CH32X033 microcontroller and is equipped with addressable LEDs, commonly known as NeoPixels. The unique combination of these components makes the USB Knob an ideal choice for a wide range of applications, including volume control for PCs.
One of the standout features of the USB Knob is that it requires no driver installation, making it incredibly easy to use. The device acts as a USB human interface device (HID), meaning that it can be recognized and utilized by most computers without the need for additional software.

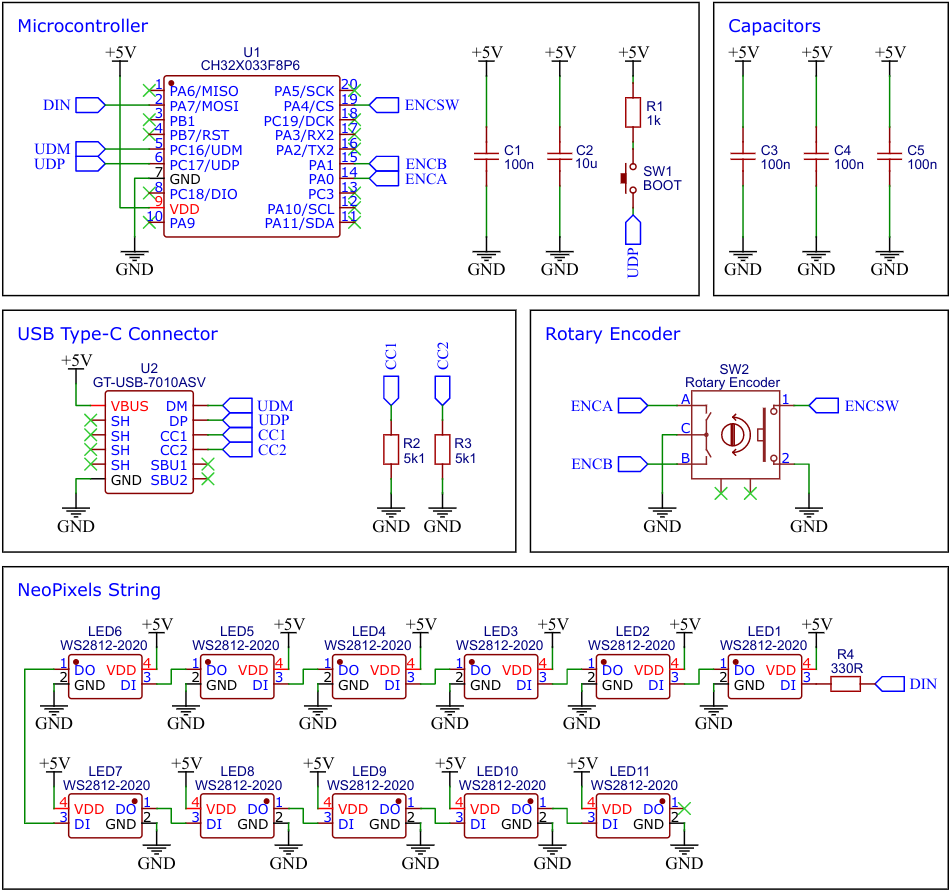
CH32X033 is a low-cost microcontroller that utilizes the QingKe 32-bit RISC-V4C core, supporting the RV32IMAC instruction set along with self-extending instructions. This microcontroller comes with a built-in USB PHY and supports USB2.0 full-speed device functions. It features a programmable protocol I/O controller (PIOC), 2 groups of operational amplifiers (OPA) with programmable gain (PGA), 2 groups of analog comparators (CMP), a 12-bit analog-to-digital converter (ADC), a 10-channel touch-key controller, 4 groups of USART, I2C, SPI, multiple timers, and various other peripheral resources. The device can operate at clock frequencies of up to 48MHz and is compatible with a supply voltage range of 2.0V to 5.5V. The CH32X033 includes 62KB of flash, 20KB of SRAM, and an embedded USB bootloader.
- Take the Gerber files (the zip file inside the hardware folder) and upload them to a PCB (printed circuit board) manufacturer of your choice (e.g., JLCPCB). They will use these files to create the circuit board for your device and send it to you.
- Once you have the PCB, you can start soldering the components onto it. Use the BOM (bill of materials) and schematic as a guide to make sure everything is connected correctly. You can find the corresponding files in the hardware folder.
- Upload the firmware by following the instructions in the next section (see below).
- To create the case for your device, use the stl files in the 3dprint folder with your 3D printer. Make sure to use transparent filament for the ring.
- After printing, secure the PCB to the bottom of the case using four self-tapping M2x5mm screws.
- Next, glue the ring from the bottom into the circular recess in the top of the case.
- Finally, assemble the case. Place the knob onto the rotary encoder. Your device is now ready to use!

This firmware enables the USB Knob to control the volume of your computer. By turning the knob, you can increase or decrease the volume, while pressing the knob will mute or unmute the sound. The device is recognized as a USB HID consumer multimedia keyboard and should work immediately without the need for any driver installation.
This firmware is designed to transform the USB Knob into a mouse wheel. By rotating the knob, it emulates the movement of a mouse wheel, allowing users to scroll up and down web pages, among other things. Pressing the knob is equivalent to clicking on the mouse wheel or the middle mouse button. The device registers as a USB HID mouse on the computer and should work immediately without the need for driver installation.
This firmware is perfect for customizing it according to your own preferences. It allows for the free mapping of USB HID actions to USB Knob events. The firmware is structured and commented in such a way that it should be possible to make adjustments even with basic programming skills. It is designed as a USB HID composite device that combines a keyboard, a mouse, and a game controller.
On Linux you do not need to install a driver. However, by default Linux will not expose enough permission to upload your code with the USB bootloader. In order to fix this, open a terminal and run the following commands:
echo 'SUBSYSTEM=="usb", ATTR{idVendor}=="4348", ATTR{idProduct}=="55e0", MODE="666"' | sudo tee /etc/udev/rules.d/99-ch55x.rules
echo 'SUBSYSTEM=="usb", ATTR{idVendor}=="1a86", ATTR{idProduct}=="55e0", MODE="666"' | sudo tee -a /etc/udev/rules.d/99-ch55x.rules
sudo udevadm
For Windows you can use the Zadig tool to install the correct driver. Here, click "Options" -> "List All Devices" and select the USB module. Then install the libusb-win32 driver. To do this, the board must be connected and the microcontroller must be in bootloader mode.
The bootloader must be started manually for new uploads. To do this, the board must first be disconnected from the USB port. Now press the BOOT button and keep it pressed while reconnecting the board to the USB port of your PC. The chip now starts in bootloader mode, the BOOT button can be released and new firmware can be uploaded via USB within the next couple of seconds.
Install the toolchain (GCC compiler, Python3, and chprog):
sudo apt install build-essential libnewlib-dev gcc-riscv64-unknown-elf
sudo apt install python3 python3-pip
pip install chprog
Open a terminal and navigate to the folder with the makefile. Press the BOOT button and keep it pressed while connecting the board to the USB port of your PC. Run the following command to compile and upload:
make flash
Follow the instructions on CNLohr's ch32v003fun page to set up the toolchain on your respective operating system (for Windows, use WSL). Also, install Python3 and chprog. Compile and upload with "make flash". Note that I only have Debian-based Linux and have not tested it on other operating systems.
- Install PlatformIO and platform-ch32v. Follow these instructions to do so. Linux/Mac users may also need to install pyenv.
- Click on "Open Project" and select the firmware folder with the platformio.ini file.
- Press the BOOT button and keep it pressed while connecting the board to the USB port of your PC. Then click "Upload".
WCH offers the free but closed-source software WCHISPTool to upload firmware with Windows via the USB bootloader. Press the BOOT button and keep it pressed while connecting the board to the USB port of your PC. Release the BOOT button, open the .hex file in the bin folder with WCHISPTool and upload it to the microcontroller.
If Python3 is installed, you can also use the platform-independent open-source command-line tool chprog for uploading:
chprog bin/<firmware>.bin
- EasyEDA Design Files
- MCU Templates
- MCU Flash Tools
- CH32X033 Datasheets
- ATtiny85 TinyKnob
- CH552E USB Knob
- CH552E MacroPad mini
- CH552G MacroPad plus


This work is licensed under Creative Commons Attribution-ShareAlike 3.0 Unported License. (http://creativecommons.org/licenses/by-sa/3.0/)