This project is an implementation of various Stag Hunt-like environments for Open AI Gym and PettingZoo. Besides the simple matrix form Stag Hunt, the repository includes 3 different multi-agent grid-based stochastic games as described in this paper. The core goal of the project is to offer a robust, efficient, and customizable environment for exploring prosocial behavior in multi-agent reinforcement learning. Feedback and requests for features are welcome.
Developed as part of my honors BSC senior thesis at Drew University. Feel free to check it out!
If you end up using this in your work, please reference it with:
@techreport{
nesterov-rappoport_2022,
title = "The Evolution of Trust: Understanding Prosocial Behavior in Multi-Agent Reinforcement Learning Systems",
author = "Nesterov-Rappoport, David Lvovich",
year = "2022",
institution = "Drew University",
address = "Madison, NJ",
month = may
}
import gym
import gym_stag_hunt
import time
env = gym.make("StagHunt-Hunt-v0", obs_type='image', ...) # you can pass config parameters here
env.reset()
for iteration in range(1000):
time.sleep(.2)
obs, rewards, done, info = env.step([env.action_space.sample(), env.action_space.sample()])
env.render()
env.close()import gym
import gym_stag_hunt
from ray import tune
from ray.rllib.env.wrappers.pettingzoo_env import PettingZooEnv
from gym_stag_hunt.envs.pettingzoo.hunt import raw_env
if __name__ == "__main__":
def env_creator(args):
return PettingZooEnv(raw_env(**args))
tune.register_env("StagHunt-Hunt-PZ-v0", env_creator)
model = tune.run(
"DQN",
name="stag_hunt",
stop={"episodes_total": 10000},
checkpoint_freq=100,
checkpoint_at_end=True,
config={
"horizon": 100,
"framework": "tf2",
# Environment specific
"env": "StagHunt-Hunt-PZ-v0",
# General
"num_workers": 2,
# Method specific
"multiagent": {
"policies": {"player_0", "player_1"},
"policy_mapping_fn": (lambda agent_id, episode, **kwargs: agent_id),
"policies_to_train": ["player_0", "player_1"]
},
# Env Specific
"env_config": {
"obs_type": "coords",
"forage_reward": 1.0,
"stag_reward": 5.0,
"stag_follows": True,
"mauling_punishment": -.5,
"enable_multiagent": True,
}
}
)A 2x2 Stag Hunt game as usually described in game theory literature. If both agents choose to hunt, they each earn the stag_reward. If one agent chooses to hunt, but the other one doesn't, the agent is punished with the mauling_punishment. An agent which chooses to forage, always earns a guaranteed forage_reward.
Observations: Last taken agent actions.
Actions: Cooperate or Defect, encoding is COOPERATE=0, DEFECT=1.
param = format = default value:
Description
cooperation_reward = int = 5:
Reinforcement reward for when both agents choose to cooperate.
defect_alone_reward = int = 1:
Reinforcement reward for defecting when the other agent is choosing to cooperate.
defect_together_reward = int = 1: Reinforcement reward for defecting when the other agent is choosing to also defect.
failed_cooperation_punishment = int = -5:
Reinforcement reward (or, rather, punishment) for choosing to cooperate when the other agent chooses not to.
eps_per_game = int = 1:
Included for convenience, the environment will keep a counter of episodes and once you hit eps_per_game it will set the internal done flag to True and reset the eps counter.
B
C D
╔══╦══╗
C ║AB║ ║
║ ║ ║
A ╠══╬══╣
║ ║ ║
D ║ ║ ║
╚══╩══╝
A and B are cooperating here.
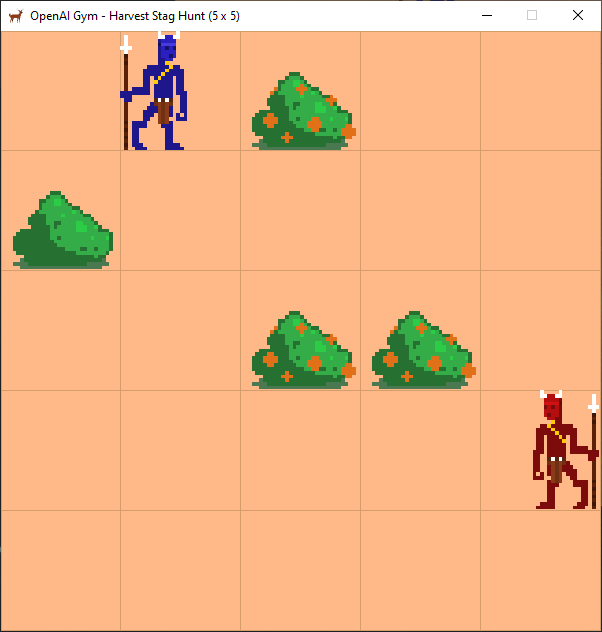
Two agents start off in the top two corners of a grid_size[0]xgrid_size[1] grid. A stag is placed in the center of the grid. forage_quantity plants are then placed in forage_quantity random unoccupied cells. In each time step, each agent moves up, down, left or right, and the stag
either moves towards the nearest agent (default) or takes a random move. At the end of the time step, if an agent is on top of a plant, it harvests it getting
forage_reward reinforcement. If an agent is on top of a stag, and the other agent is not, the victim agent gets mauled, losing mauling_punishment points. However, if both agents are on top of the stag, they catch it, both earning stag_reward reinforcement points. After a specified amount of
time steps (episodes_per_game), the game is considered done and the environment will reset the position of its entities.
Observations: RGB pixel array or box coordinate array.
Actions: Left, down, right or up on the grid. Encoding is LEFT=0, DOWN=1, RIGHT=2, UP=3.

╔════════════════════════════╗
║ ·A · P· · · B · ║
║ · · · · · · ║
║ · · · S · · · ║
║ · · · · P· · ║
║ · · · · · · ║
╚════════════════════════════╝
grid_size = (N, M) = (5, 5):
Dimensions of the simulation grid. M x N should be equal to at least 3.
screen_size = (X, Y) = (600, 600):
Dimensions of the virtual display where the game will render. Irrelevant if pygame will not be used.
obs_type = 'image' or 'coords' = 'image':
What type of observation you want. Image gets you a coordinate array with RGB tuples corresponding to pixel color. Coords gets you a coordinate array with boolean tuples of size 4 signifying the presence of entities in that cell (index 0 is agent A, index 1 is agent B, index 2 is stag, index 3 is plant).
load_renderer = bool = False:
Used if you want to render some iterations when using coordinate observations. Irrelevant when using image observations.
episodes_per_game = int = 1000:
How many episodes (time steps) occur during a single game of Stag Hunt before entity positions are reset and the game is considered done.
stag_reward = int = 5:
Reinforcement reward for when agents catch the stag by occupying the same cell as it at the same time. Expected to be positive.
stag_follows = bool = True:
Whether or not the stag should seek out the nearest agent at each time step. If false, the stag will take a random action instead.
run_away_after_maul = bool = False:
Whether or not the stag re-appears in a different cell after mauling an agent. When false, this can lead to difficulties with learning as agents will often get overwhelmed by the (very aggressive apparently) stag, who will relentlessly chase them continuously mauling them. An intelligent agent may never get caught, as by taking a step away from the stag at each time step they can avoid it entirely. Learning this initially, however, can be difficult.
forage_quantity = int = 2:
How many plants should be at the grid at any given time step. Cannot be higher than N x M - 3. N x M is the total number of cells, and -3 is for the 3 cells occupied by the agents and stag.
forage_reward = int = 1:
Reinforcement reward for harvesting a plant. Expected to be positive.
mauling_punishment = int = -5:
Reinforcement reward (or, rather, punishment) for getting mauled by a stag. Expected to be negative.
Two agents start off in the top two corners of a grid_size[0] x grid_size[1] grid. max_plants young plants are then placed in max_plants random unoccupied cells. In each time step, each agent moves up, down, left or right, each young plant becomes a mature plant with probability chance_to_mature, and each mature plant may die with probability chance_to_die. At the end of each time step, if an agent is on top of a young plant, it harvest it earning the young_reward for himself. If an agent is on top of a mature plant, then both him and the other agent earn mature_reward.
Observations: RGB pixel array or box coordinate array.
Actions: Left, down, right or up on the grid. Encoding is LEFT=0, DOWN=1, RIGHT=2, UP=3.
╔════════════════════════════╗
║ ·A · P· · · B · ║
║ · · · · · · ║
║ · · · S · · p · ║
║ · · p · · P· · ║
║ · · · · · · ║
╚════════════════════════════╝
grid_size = (N, M) = (5, 5):
Dimensions of the simulation grid. M x N should be equal to at least 3.
screen_size = (X, Y) = (600, 600):
Dimensions of the virtual display where the game will render. Irrelevant if pygame will not be used.
obs_type = 'image' or 'coords' = 'image':
What type of observation you want. Image gets you a coordinate array with RGB tuples corresponding to pixel color. Coords gets you a coordinate array with boolean tuples of size 4 signifying the presence of entities in that cell (index 0 is agent A, index 1 is agent B, index 2 is young plant, index 3 is mature plant).
load_renderer = bool = False:
Used if you want to render some iterations when using coordinate observations. Irrelevant when using image observations.
max_plants = int = 4:
How many plants should be on the grid.
chance_to_mature = float = 0.1:
Probability that a given young plant will mature at a given time step.
chance_to_die = float = 0.1:
Probability that a given mature plant will die at a given time step.
young_reward = int = 1:
Reward the harvesting agent gets for collecting a young plant.
mature_reward = int = 2:
Reward both agents get when one of them harvests a mature plant.
Two agents start off in the top two corners of a grid_size[0] x grid_size[1] grid. A marker (a sleeping stag) appears on one of the squares. If the agents step on the square together, they both receive +1 reinforcement, at which point the marker moves to an adjacent cell (the stag wakes up and runs away). If the agents step together onto the next square, they receive 1 point. If at any time an agent breaks the streak (eg. by stepping off the path), the other agent receives a penalty of some multiplier (streak_break_punishment_factor) times the current length T of the streak and the game ends. The current streak length T is a part of the observation.
Observations: RGB pixel array or box coordinate array.
Actions: Left, down, right or up on the grid. Encoding is LEFT=0, DOWN=1, RIGHT=2, UP=3.

╔════════════════════════════╗
║ ·A · · · · B · ║
║ · · · · · · ║
║ · · · · · · ║
║ · · M · · · · ║
║ · · · · · · ║
╚════════════════════════════╝
grid_size = (N, M) = (5, 5):
Dimensions of the simulation grid. M x N should be equal to at least 3.
screen_size = (X, Y) = (600, 600):
Dimensions of the virtual display where the game will render. Irrelevant if pygame will not be used.
obs_type = 'image' or 'coords' = 'image':
What type of observation you want. Image gets you a coordinate array with RGB tuples corresponding to pixel color. Coords gets you a coordinate array with boolean tuples of size 4 signifying the presence of entities in that cell (index 0 is agent A, index 1 is agent B, index 2 is young plant, index 3 is mature plant).
load_renderer = bool = False:
Used if you want to render some iterations when using coordinate observations. Irrelevant when using image observations.
streak_break_punishment_factor = float = 0.5:
The factor for calculating the negative reinforcement.