{kind=link}
 中文版说明
中文版说明
TianRacer详细中文操作手册
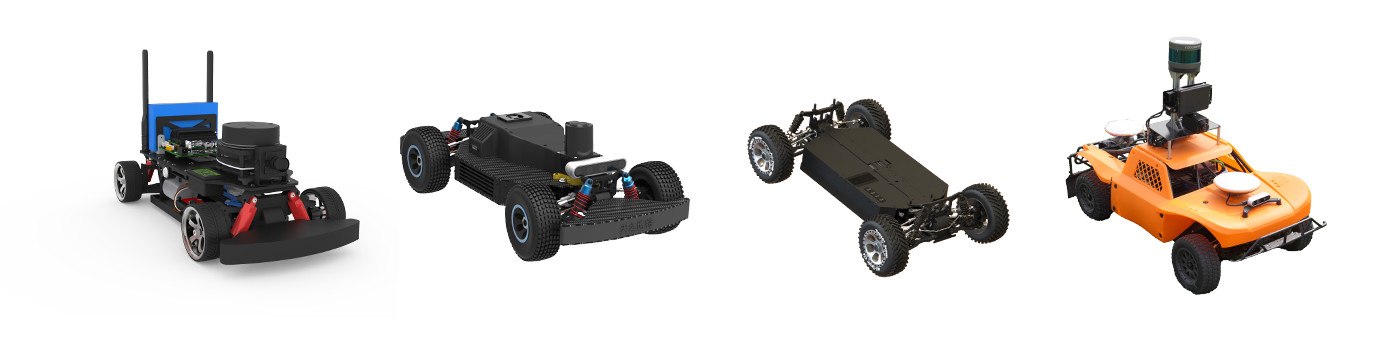
Tianracer is a series of low-cost autonomous vehicles ranging in size from 1:10 to 1:5, controlled in a closed-loop system, allowing them to follow input commands more faithfully. All Tianracer models are equipped with NVIDIA development boards, including Jetson Nano, Jetson TX2, Xavier, Orin, and more. The basic version of Tianracer can reach a maximum speed of 3m/s, while the pro version can achieve speeds up to 10m/s.
TianRacer ROS Wiki Our objective is to develop an affordable autonomous racing car, the Tianracer, with capabilities extending beyond basic mapping, localization, and navigation. It will feature advanced functionalities such as object detection, traffic light detection, and lane keeping. Currently, Tianracer builds upon and enhances the AI capabilities inherited from Jetracer.
The Tianracer Nano version is a standard platform with all the hardware and software installed, a ready-to-go racing car.
点击这里进入淘宝购买或咨询客服: Purchase from Taobao:
We developed the Tianracer based on the Hypha racecar. Please check out the original authors' repo for more details. https://github.com/Hypha-ROS/hypharos_racecar
Developer:
- HaoChih, LIN
- KaiChun, WU
Tianracer gazebo simulation is imported from https://github.com/Lord-Z/ackermann_gazebo
Developer:
- Yuxing, ZHANG
Speed: 3m/s - 10m/s Control:closed-loop speed control Computer: Nvidia Jetson Nano/TX/NX/Orin Developer Kit Chassis: BLDC Motor + TianBoard Mini + Servo Lidar: Slamtec / Osight / Richbeam / Livox Camera: 1080P Fisheye Undistorted USB3.0 / RGBD Camera Remote Controller: DJI DT7 Battery: LiPo
cd ~/catkin_ws/src/
git clone https://github.com/tianbot/tianracer.git
cd ~/catkin_ws && catkin_make
Tianracer can be simulated in F1tenth Simulator. Install the simulator first.
cd ~/catkin_ws/src/
git clone https://github.com/f1tenth/f1tenth_simulator.git
cd ~/catkin_ws && catkin_make
Simulate Tianracer
roslaunch tianracer_navigation simulator_wall_following.launch
Tianracer can be brought up all at once, or separately.
roslaunch tianracer_bringup tianracer_bringup.launch
roslaunch tianracer_core tianracer_core.launch
roslaunch tianracer_bringup lidar.launch
roslaunch tianracer_bringup rgbd_camera.launch
roslaunch tianracer_bringup usb_cam.launch
roslaunch tianracer_bringup gps.launch
After bringing up the Tianracer, we provide three methods to perform slam for 2D laser.
roslaunch tianracer_slam tianracer_gmapping.launch
roslaunch tianracer_slam tianracer_hector.launch
roslaunch tianracer_slam tianracer_cartographer.launch
Map will be saved as tianbot_office in tianracer_slam/maps/
roslaunch tianracer_slam map_save.launch
After saving the map, the map can be used to perform navigation.
roslaunch tianracer_navigation tianracer_teb_nav.launch
Configure running ROS across multiple machines, then launch RViz in a PC with a display
roslaunch tianracer_rviz view_teb_planner.launch