In this sample we use Virtual Stick for GPS missions. 3 main functions from the aircraft are supported: Aircraft move x, y, z / gimbal move / camera with AEB or time intervall. The GPS mission is stored in an Array.
We must add 2 listeners for the aircraft location and the aircraft heading
self.aircraftLocation
self.aircraftHeading
if let locationKey = DJIFlightControllerKey(param: DJIFlightControllerParamAircraftLocation) {
DJISDKManager.keyManager()?.startListeningForChanges(on: locationKey, withListener: self) { [unowned self] (oldValue: DJIKeyedValue?, newValue: DJIKeyedValue?) in
if newValue != nil {
let newLocationValue = newValue!.value as! CLLocation
if CLLocationCoordinate2DIsValid(newLocationValue.coordinate) {
self.aircraftLocation = newLocationValue.coordinate
}
}
}
DJISDKManager.keyManager()?.getValueFor(locationKey, withCompletion: { (value:DJIKeyedValue?, error:Error?) in
if value != nil {
let newLocationValue = value!.value as! CLLocation
if CLLocationCoordinate2DIsValid(newLocationValue.coordinate) {
self.aircraftLocation = newLocationValue.coordinate
}
}
})
We must add a timer to send continuous commands to the aircraft. Mission Array like Litchi CVS The simplified version without actions
[[Double]]
[[Waypoint]]
[[lat,lon,alt,pitch]]
var grid = [[Double]]
We can add action in the array or read Litchi CSV
[[lat,lon,alt,pitch, action_type, POIlat, POIlon…]]
We must create the mission in an array before we start it in GCD
We create for each GCD action one dispatch group
var queue = DispatchQueue(label: "ch.hdrpano.myqueue")
var photoDispatchGroup = DispatchGroup()
var aircraftDispatchGroup = DispatchGroup()
var gimbalDispatchGroup = DispatchGroup()
…
When we use virtual stick, the remote controller will be out of service for the pilot. This is dangerous. For this reason, we pack all in async queue to stop the mission at any time we want and to stop virtual stick. We must handle the remaining power of the aircraft too. When the capacity is below 30% we must stop the mission and virtual stick.
self.vsController.prepareVirtualStick()
self.vsController.startVirtualStick()
self.vsController.startAdvancedVirtualStick()
We start the mission (split for multiple flight possible = battery capacity and DJI Mission limitation) grid.count() will gives us the number of waypoints.
self.queue.asyncAfter(deadline: .now() + 1.0) {
for mP in grid {
let index = grid.firstIndex(of: mP) ?? 0
if index >= startIndex { // multiple flight index
let lat = mP[0]
let lon = mP[1]
let alt = mP[2]
let pitch = mP[3]
if CLLocationCoordinate2DIsValid(CLLocationCoordinate2DMake(lat, lon)) && alt < 250 && index - startIndex <= 90 {
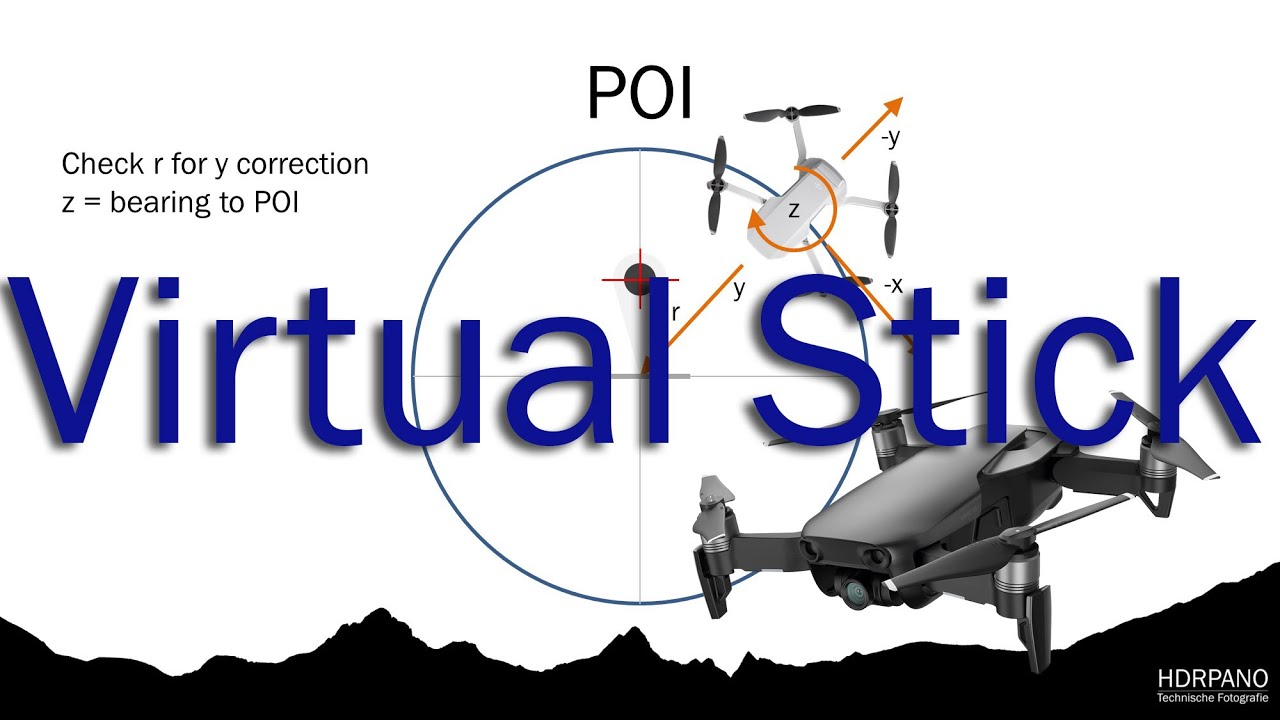
Now we check the distance and the bearing from the aircraft towards the waypoint. If the aircraft heading points not towards the waypoint we must yaw the aircraft first. With high speed it is dangerous to yaw and fly forward at the same time for low speed aircrafts like the Mini. It will be no problem for a Phantom.
If abs(aircraftHeading – bearing) > 14 {
self.vsYaw(yaw: bearing)
}
self.vsMove(roll: speed, pitch: 0, yaw: bearing, vertical: alt)
}
You can watch videos about this project on my youtube channel:
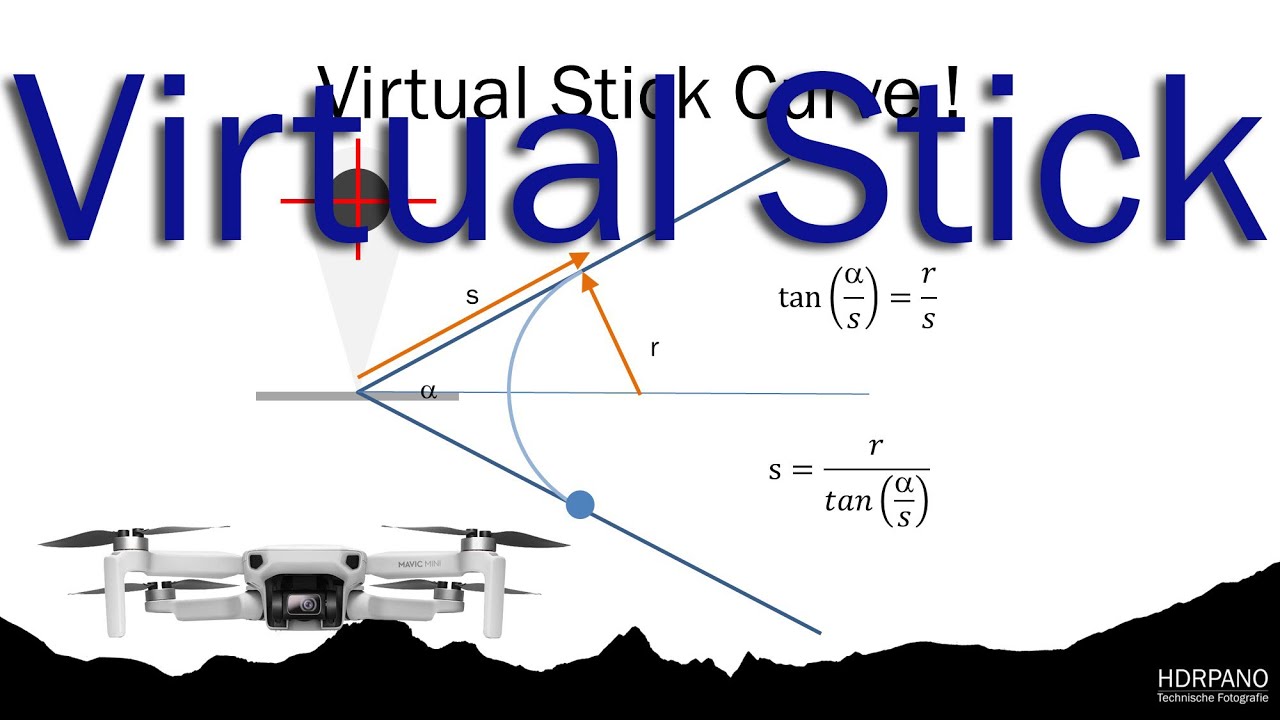
We must adapt speed depending on the distance between 2 waypoints. If the distance is for example 10m you cannot use speed = 8m/s. We must start decelerating speed when we approach the next waypoint. To go smooth we need to start deceleration at the speed/2 when we are at the distance of the speed value. We can calculate the maximum speed = distance / 5. The latency of a small drone is too high when we move only in a few seconds. Acceleration <> Deceleration <> Stop.
If you try to use SDK 4.14 you better delete your older APP (4.13 et.c) first on the iOS system before you reinstall it. Il will not work if you don't. Add com.dji.logiclink in the Info file (already done for this project).
Start the latest Assistant software and start fly. The Sample will not connect if the home point is not updated.